





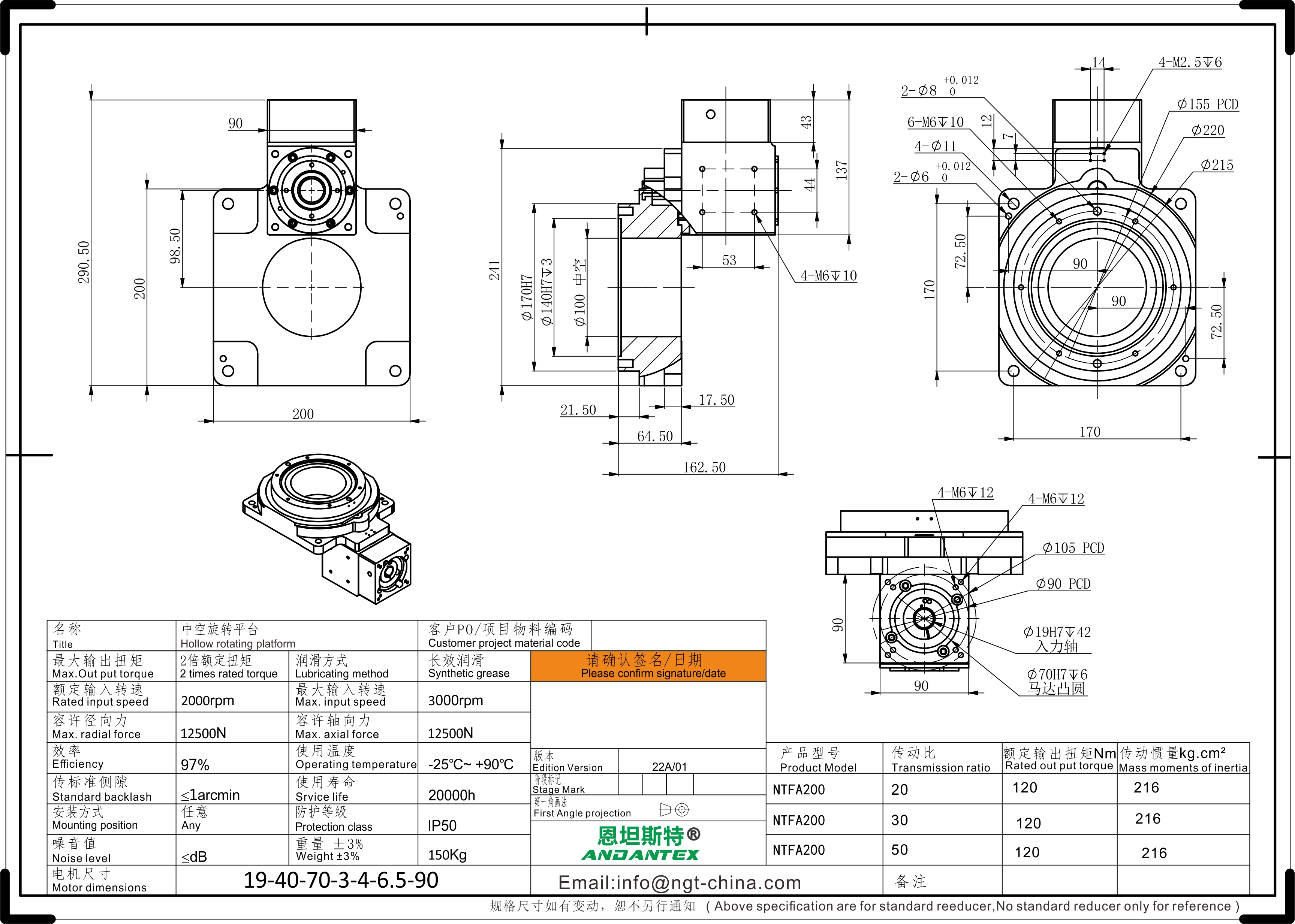
Спецыфікацыя
Асаблівасці
Полая паваротная платформа пад прамым вуглом выкарыстоўваецца ў машынах і абсталяванні па тэхналогіі павярхоўнага мантажу (SMT) наступным чынам:
Эканомія прасторы: дзякуючы полай канструкцыі ўнутры платформы можна размясціць кабелі і паветраныя трубкі, эканомячы месца ў абсталяванні і паляпшаючы гнуткасць агульнай кампаноўкі.
Высокадакладнае кручэнне: платформа здольная да высокадакладнага вярчальнага руху, што падыходзіць для працэсаў SMT, якія патрабуюць дакладнага пазіцыянавання, такіх як размяшчэнне, праверка і пайка.
Шматвосевы рух: у спалучэнні з іншымі рухальнымі платформамі прамавугольная полая паваротная платформа можа рэалізаваць складаны шматвосевы рух для задавальнення розных патрабаванняў працэсу.
Павелічэнне прадукцыйнасці: дзякуючы хуткаму кручэнню і пазіцыянаванні час пераключэння абсталявання скарачаецца, што павялічвае прадукцыйнасць.
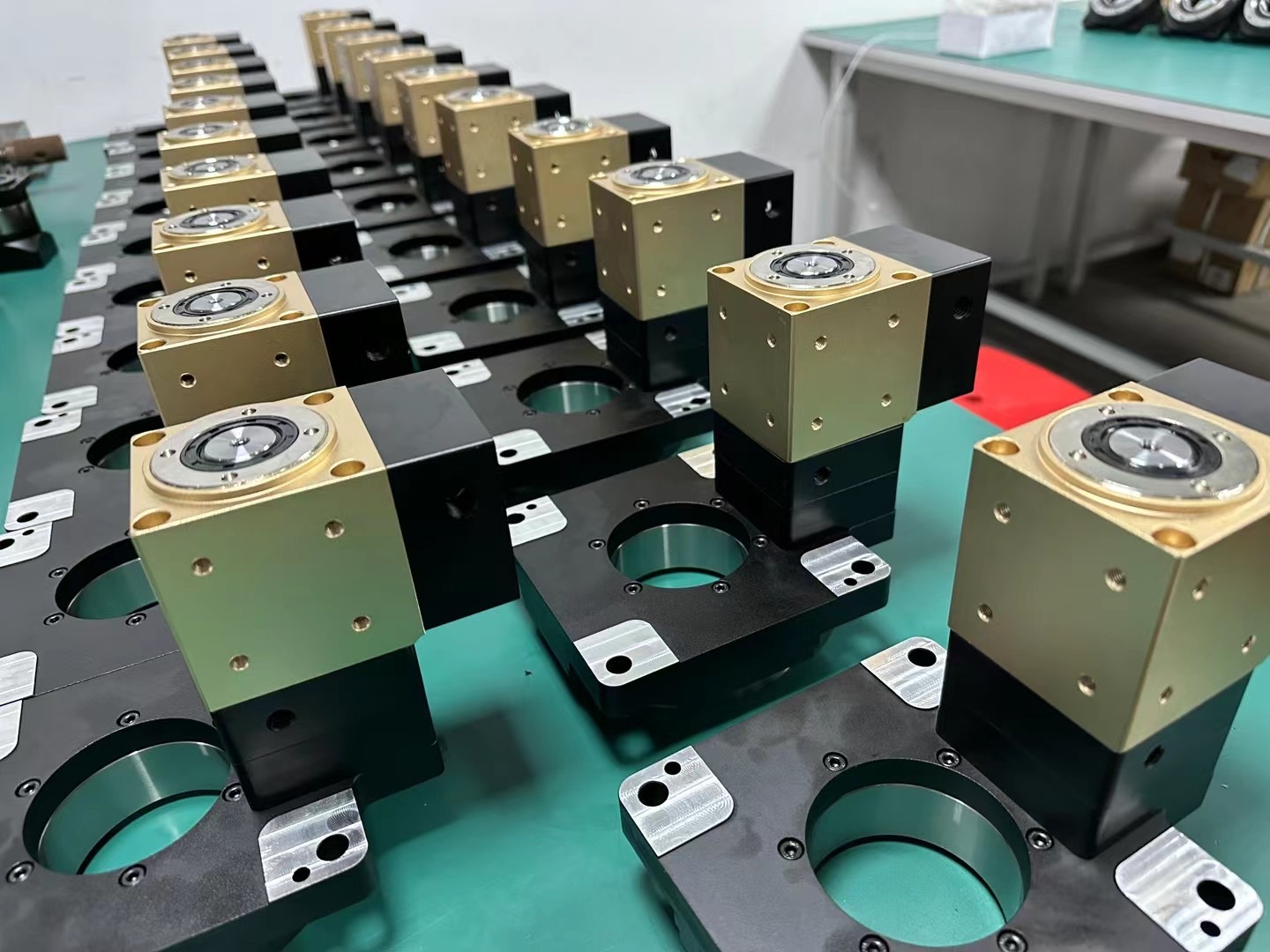
Даўгавечнасць і стабільнасць: звычайна выраблены з высокатрывалых матэрыялаў, ён можа вытрымліваць вялікія нагрузкі і забяспечваць стабільнасць у працоўных умовах высокай інтэнсіўнасці.
Гнуткасць прымянення: можа шырока выкарыстоўвацца ў розным абсталяванні SMT, такім як машыны для размяшчэння, кантрольнае абсталяванне і аўтаматызаваныя зборачныя лініі.
Карацей кажучы, прамавугольная полая паваротная платформа забяспечвае эфектыўныя, гнуткія і дакладныя рашэнні ў машынах і абсталяванні SMT, спрыяючы аўтаматызацыі і разумнаму развіццю сучаснай электроннай вытворчасці.
Прыкладанні
У машынах і абсталяванні SMT (тэхналогія павярхоўнага мантажу) рэалізацыя шматвосевага руху вельмі важная для задавальнення патрабаванняў складаных зборак. Гнуткасць і высокая дакладнасць полых паваротных прыступак пад прамым вуглом робяць іх ідэальнымі для рэалізацыі руху па некалькіх восях. Гэтыя этапы часта выкарыстоўваюцца ў спалучэнні з іншымі тыпамі этапаў руху, такімі як лінейныя слізгацення, этапы ўздыму і г.д., для стварэння шматмернай сістэмы руху. Дзякуючы дакладным сістэмам кіравання і алгарытмам руху, можна скаардынаваць полыя паваротныя платформы з прамым вуглом для рэалізацыі рухаў, уключаючы, але не абмяжоўваючыся імі, двухмерныя (плоскасць XY) і трохмерныя (прастора XYZ) рухі.
Сістэма кіравання адыгрывае вырашальную ролю ў рэалізацыі механізму шматвосевага руху. Сучасная тэхналогія кіравання рухам выкарыстоўвае серварухавікі і высокапрадукцыйныя энкодэры, якія здольныя кантраляваць і рэгуляваць стан сцэны ў рэжыме рэальнага часу. Серварухавікі забяспечваюць дакладнае кручэнне і зрушэнне, а энкодэры з высокім разрозненнем забяспечваюць зваротную сувязь аб бягучым становішчы. У выніку, аб'яднаўшы полыя паваротныя прыступкі пад прамым вуглом з удасканаленым праграмным забеспячэннем для кіравання рухам, інжынеры могуць запраграмаваць складаныя траекторыі руху і логіку кіравання, каб гарантаваць, што абсталяванне дасягае высокай дакладнасці і хуткасці ў руху па некалькіх восях.
Змест пакета
1 х жамчужная баваўняная абарона
1 х спецыяльная пена для ўдаратрываласці
1 х спецыяльная кардонная або драўляная скрынка










